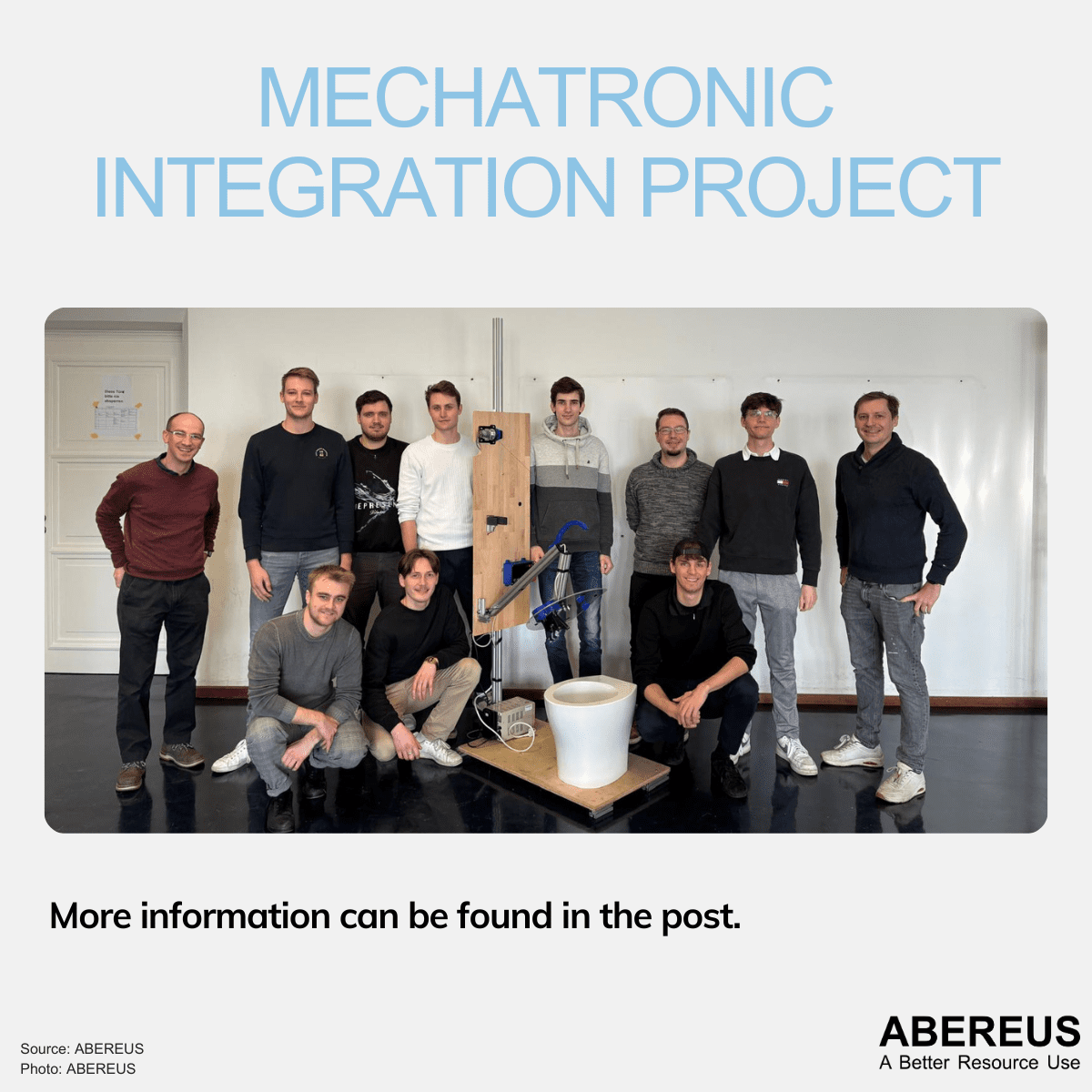
This winter semester we had a Mechatronic Integration Project with the university of Applied Sciences Munich. A team of ten students participated. The goal was to try to find solutions for the following issue.
Problem: Accumulated waste can limit the diversion of urine in waterless urine-diverting toilets. This requires a low-energy, autonomous, chemical-free, and waterless solution to maintain functionality. The device should operate on 12V.
Prototype Solution: The prototype features a mechanical cleaning system with a descending arm positioned precisely in the toilet bowl using an adjustment plate. This design reliably removes waste without water or chemicals. It uses a wiping mechanism. A flexible foam lip attached to a four-bar linkage wipes trash into the feces hole with a perpendicular motion to the toilet. The motion is powered by geared motors controlled by an L298 motor driver. This motor driver is managed by an ESP32 Devkit V1. The device operates entirely on 12V without the need for water or cleaning agents.
Safety and Customization: An integrated sensor system prevents cleaning activation when the toilet cabin is occupied, or the door is open. The device’s modular design allows for customer-specific adjustments. Additionally, it simplifies maintenance.
We’d like to thank the professors Prof. Dr. Peter Leibl, Prof. Dr. Christian M. Seidel and Prof. Dr. Alexander Steinkogler for letting us be part of their project class.
We also congratulate the team of Maximilian Berkemeier, Stefan Seitz, Hannes Niestroj, Luis Thoma, Elias Kruse, Stephan Baumgartner, Sebastian Lingnau, Jan Siffling, Jörn Kosciessa for their amazing job. We hope to continue their work.
If you want to find out more about our cooperations, toilets, and new invention projects, get connected and join us for a better resource use.